خودڪار فعال ماپڻ وارو اوزار
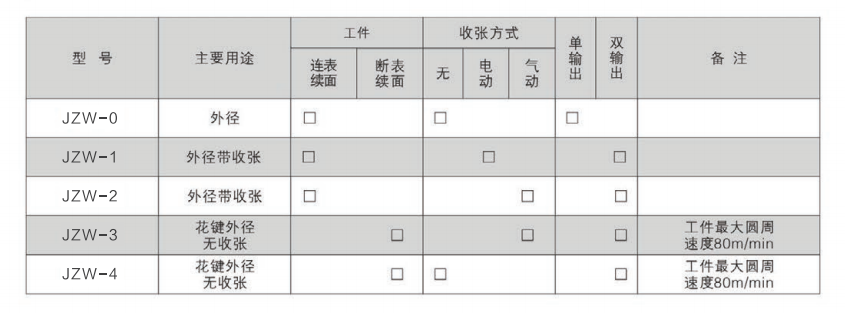
پيداوار جي درخواست
لچڪدار نظام جو اڳڪٿي ڪنٽرول جيڪو اڳڪٿي ڪنٽرول تي لاڳو ٿئي ٿو اهو آهي ته پروسيسنگ ۾ ماپ ۽ پروسيسنگ ماپ کي گڏ ڪري هڪ بند لوپ ماپ سسٽم ٺاهيو وڃي ته جيئن مشين ٽول جي پروسيسنگ حالت کي ڪنٽرول ڪري سگهجي ۽ يقيني بڻائي سگهجي ته فضول جي پروسيسنگ جو ڪو به ڪنٽرول سسٽم ناهي. مشين ٽول جو لچڪدار ڪنٽرول گهٽ ۾ گهٽ بند لوپ سسٽم ۾ ڪنٽرولر سان حاصل ڪري سگهجي ٿو جيڪو پروسيسنگ ۽ پوسٽ پروسيسنگ ماپ جي قابل آهي. ڪمپيوٽر سان ماپڻ وارو اوزار، مٿين مشين ۽ هيٺين مشين سان وڌيڪ رابطو، خودڪار لائن جي مجموعي متحد انتظام کي محسوس ڪري سگهي ٿو. تنهنڪري توهان فضول کي پروسيس ڪرڻ کان سواءِ هڪ انتهائي ڪارآمد خودڪار پيداوار لائن ٺاهي سگهو ٿا. ان کان علاوه، مختلف قسم جا سينسر، ڳولڻ لاءِ مختلف ٻاهرين شين سان ملندڙ، يقيني بڻائي سگهن ٿا ته سڄو سسٽم ٻاهرين کان متاثر نه ٿئي.
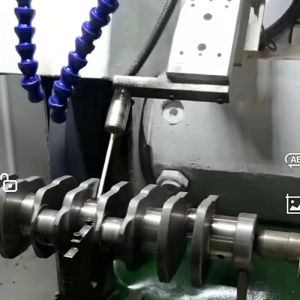
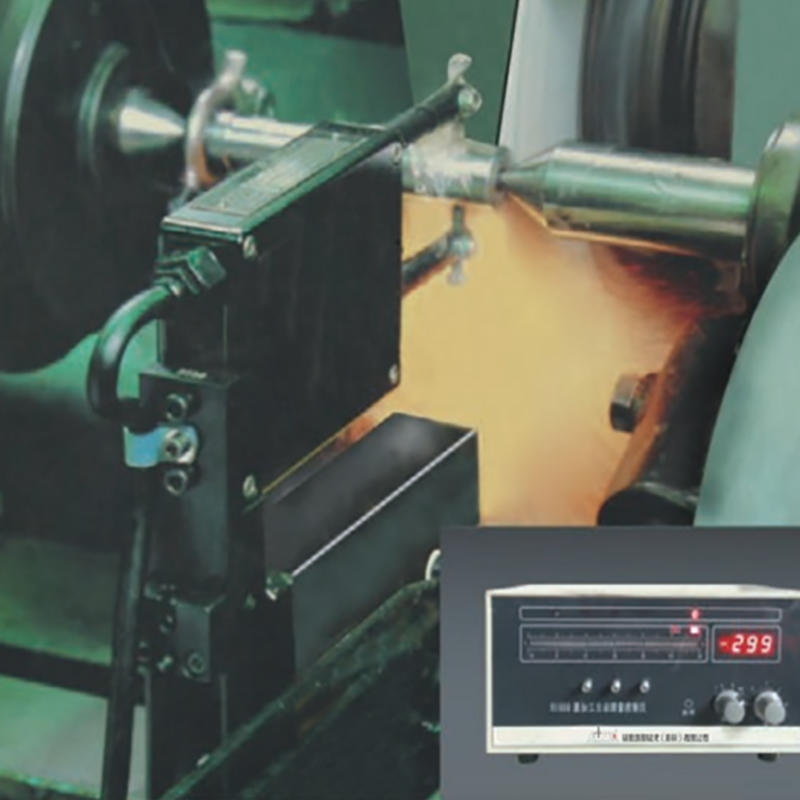
فعال ماپ جو انڊنگ عمل پروسيسنگ دوران، ماپڻ وارو ڊوائيس ڪنهن به وقت ورڪ پيس کي ماپيندو آهي ۽ ماپ جا نتيجا ڪنٽرولر ۾ داخل ڪندو آهي. اڳ ۾ مقرر سگنل پوائنٽ تي، ڪنٽرولر مشين ٽول جي آپريشن کي ڪنٽرول ڪرڻ لاءِ سگنل موڪليندو آهي. مثال طور، گرائنڊنگ جي عمل ۾، ڪوئر گرائنڊنگ فيڊ، جڏهن پهرين سائيز سگنل پوائنٽ، ڪنٽرولر سگنل، مشين ٽول ڪوئر گرائنڊنگ کان فائن گرائنڊنگ ڏانهن سوئچ ڪندو آهي، جڏهن ٻئي سائيز سگنل پوائنٽ، مشين ٽول فائن گرائنڊنگ فيڊ کان لائٽ گرائنڊنگ (ڪو به اسپارڪ گرائنڊنگ) ڏانهن سوئچ ڪندو آهي، جڏهن ٽيون سگنل پوائنٽ، ورڪ پيس کي پري سيٽ سائيز ڏانهن، گرائنڊنگ ويل جلدي واپس ايندو آهي، ۽ ايندڙ چڪر جي اسٽينڊ بائي حالت ۾ داخل ٿيندو آهي.
پيداوار جي ماپ
پراڊڪٽ وڊيو

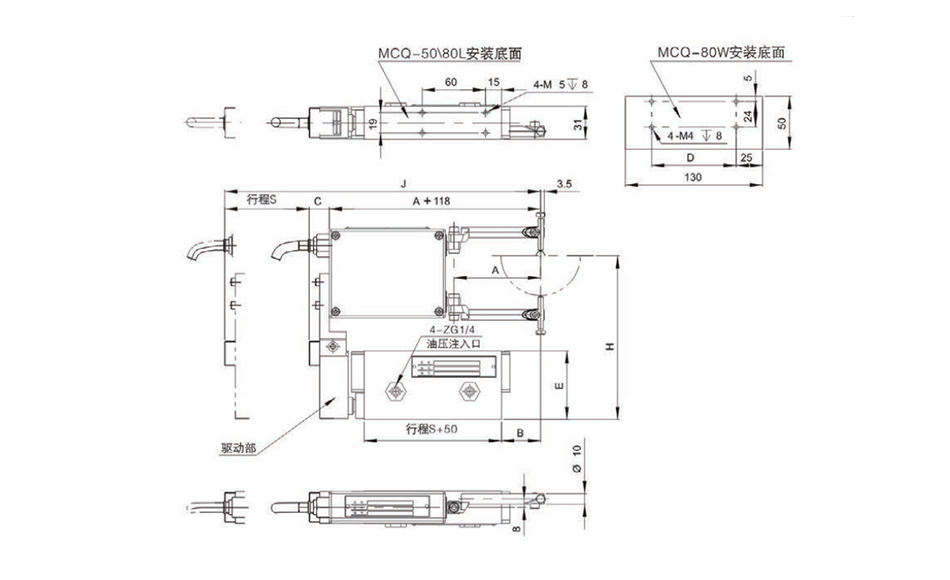
پيداوار جي سائيز